

 [CS5670] Lecture 10: Cameras (1) pinhole, lens camera
[CS5670] Lecture 10: Cameras (1) pinhole, lens camera
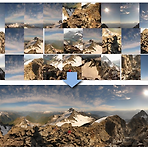
자료 출처: CS5670 Cameras, CMU Geometric camera models 저에게 해당 내용들은 굉장히 어렵고 생소합니다. 물론 열심히 공부하고 이해한 것을 바탕으로 정리를 하겠지만, 설명이 장황하고 방대해질 것 같습니다. 핵심 내용만을 보고 싶다면 위의 자료 출처를 참고 부탁드립니다. 감사합니다. 서론 homographies을 통해 360 panorama를 만들 수 있을까? 이를 이해하려면 camera에 대해 알아야 한다고 합니다. computer vision의 목표는 digital image로부터 3-dimensional world의 속성을 계산하는 것에 있습니다. 이미지와 비디오의 분석을 통해 3D shape을 reconstruct하는 것, 어떻게 움직이는지 파악하고 인식하는 것이 ..
 [보충] Affine transformations and Homography
[보충] Affine transformations and Homography
해당 게시글은 제가 뭘 모르는지도 잘 모르는 채 일단 정리합니다. 혼자 공부하며 정리한 내용이다 보니 오류가 있을 수도 있는데 발견시 지적해주시면 정말 감사드리겠습니다.🤦♀️ Intro 이미지/영상 작업에 있어 Transformation은 기본적인 이미지 처리 방법인 filter나 blurring 등의 적용을 의미합니다. 픽셀 단위 별로 변환을 주는 작업에 해당됩니다. 특징으로는 픽셀 값의 변화가 있을 뿐, 픽셀의 위치 이동은 없다는 점입니다. 여기서 Geometric transformation이란 영상을 구성하는 픽셀이 배치된 구조를 변경함으로써 전체 영상의 모양알 부끄는 작업을 뜻합니다. 즉, 어떤 픽셀의 좌표가 다른 좌표로 이동되는 경우를 의미합니다. 위 그림은 대표적인 geometric tran..
 [CS5670] Lecture 7: Transformations and warping
[CS5670] Lecture 7: Transformations and warping
자료 출처: CS5670 Image alignment Why don’t these image line up exactly? What is the geometric relationship between these tow images? Answer: Similarity transformation (translation, rotation, uniform scale) Very important for creating mosaics! First, we need to know what this transformation is. Second, we need to figure out how to compute it using feature matches. 먼저 이 변환(transformation)이 무엇인지 알아야 하..
 [CS5670] Lecture 6: Feature Descriptors and Feature Matching
[CS5670] Lecture 6: Feature Descriptors and Feature Matching
내용 출처: CS5670 이번 파트는 cs5670의 6번째 강의로 Feature Descriptors and Feature Matching의 주제입니다. 책으로는 4.1 파트에 해당됩니다. Local features를 찾는데 1) Detection, 2) Description, 3) Matching이란 3단계가 있다면, 이제 2번째 단계입니다. 해당 파트는 PPT 자료에 나온 그대로 각각 흥미 있는 포인트 주위로 벡터의 특징을 추출하는 부분입니다. Feature descriptors 저번 Lec5. 에서 해당 페이지를 마지막으로 끝이 났습니다. We know how to detect good points Next question: How to match them? Answer: Come up with a..
 [CS5670] Lecture 5: Feature Invariance
[CS5670] Lecture 5: Feature Invariance
내용 출처: CS5670 Local features: main components Detection: Identify the interest points. Description: Extract vector feature descriptor surrounding each interest point. Matching: Determine correspondence between descriptors in two views. Harris features(in red) Image transformations Geometric: Rotation, Scale Photo metric: Intensity change Invariance and equivariance We want corner location to be ..
 Aliasing(엘리어싱) - 발생 이유, 결과, 방지 방법
Aliasing(엘리어싱) - 발생 이유, 결과, 방지 방법
Aliasing 출처: 위키디피아 Aliasing(앨리어싱)이란 무엇일까? 엘리어싱이란 위신호 현상의 의미로 신호 처리에서 표본화(샘플링)을 하는 가운데 각기 다른 신호를 구별해내지 못하게 하는 효과를 의미합니다. 신호가 샘플로부터 다시 구성될 때, 결과가 원래의 연속적인 신호와 달라지는 '일그러짐'을 가리키고, 계단 현상이라 부르기도 합니다. 붉은색 선: 실제 신호 검은색 실선: 샘플링 된 값 실제 신호보다 샘플링 된 값의 주기가 더 낮습니다. 이런 경우 sampling rate가 낮다고 하며, 신호를 제대로 해석할 수 없습니다. 이런 상황을 Aliasing이라고 합니다. 헷갈리는 몇 가지 용어를 정리해보자면 Sampling: 무한한 continuous한 데이터들에서 유한한 데이터를 얻어내는 과정을 의..
 [CS5670] Lecture 4: Local features & Harris corner detection
[CS5670] Lecture 4: Local features & Harris corner detection
| Today's topic is Features extraction - Corners and blobs. | Key points feature extraction local feature Harris corner detection Motivation: Automatic panoramas The human visual system has a field of view of around 135 x 200 degrees, but a typical camera has a field of view of only 35 x 50 degrees. Panoramic image mosaicing works by taking lots of pictures from an ordinary camera, and stitching..
 [CS5670] Lecture 3: Image Resampling & Interpolation
[CS5670] Lecture 3: Image Resampling & Interpolation
| Today's topic is Sampling & interpolation. | Key points Subsampling an image can cause aliasing. Better is to blur (“pre-filter”) to remote high frequencies then downsample If you repeatedly blur and downsample by 2x, you get a Gaussian pyramid Upsampling an image requires interpolation. This can be posed as convolution with a “reconstruction kernel” Image scaling This image is too big to fit ..
- Total
- Today
- Yesterday
- stylegan
- Prompt
- Unsupervised learning
- 파이썬
- 데이터셋다운로드
- support set
- clip
- 파이썬 클래스 다형성
- 도커
- CNN
- cs231n
- 서버구글드라이브연동
- 프롬프트
- style transfer
- 구글드라이브서버연동
- docker
- 딥러닝
- vscode 자동 저장
- 구글드라이브서버다운
- 도커 컨테이너
- prompt learning
- 파이썬 딕셔너리
- 구글드라이브다운
- few-shot learning
- python
- 파이썬 클래스 계층 구조
- NLP
- 구글드라이브연동
- 서버에다운
- 퓨샷러닝
| 일 | 월 | 화 | 수 | 목 | 금 | 토 |
|---|---|---|---|---|---|---|
| 1 | 2 | 3 | 4 | 5 | ||
| 6 | 7 | 8 | 9 | 10 | 11 | 12 |
| 13 | 14 | 15 | 16 | 17 | 18 | 19 |
| 20 | 21 | 22 | 23 | 24 | 25 | 26 |
| 27 | 28 | 29 | 30 |